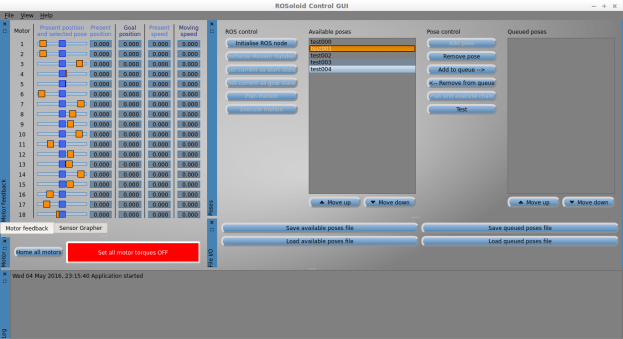
With the new PC’s development tools up and running, I’ve made a number of updates to the GUI side of things, as well as the background joint controller node. Here are some of the most important from this month.
Joint controller updates
An issue I was having with the joint controller node – a main function of which is to act as a ROS wrapper class around the Dynamixel API – was that I seemed to be getting erroneous values when executing a simple one-off read from the motors. I suspected this was related to the fact that the node is also constantly reading the motors’ feedback values as fast as possible in its main loop. Even though the Dynamixel library seems to have checks for a busy comms bus, there was likely some issue with multiple threads trying to access the bus. This was easily fixed by using ros::spinOnce() in the main loop instead of using an AsyncSpinner which starts up a separate thread.
There is still some problem where positional values for some of the motors seem to be getting constantly corrupted, but only when all the torques are enabled and the motors are struggling to achieve all their goals positions (making the typical whining noise that servos have). I’ve yet to narrow down if this is a software issue or not.
Update to read/write services
The ROS read/write services have been simplified now, and two of the most useful commands are the ones that perform a sync read and write across a number of motors. As these are ROS services they can also be called from a terminal command line. For example, to receive the current position, current speed and current torque of motors 1, 3 and 5 all at once, you can run:
rosservice call /ReceiveSyncFromAX '[1, 3, 5]' 36 3
36 is the start address for the low byte of the present position, and 3 indicates the number of control table values, including the start address, to read for each motor. This is calling the sync_read function that the USB2AX offers, via a ROS service.
In a similar way you can write goal position (100), goal speed (300) and max torque (512) to motors 1, 3 and 5 all at once by running:
rosservice call /SendSyncToAX '[1, 3, 5]' 30 '[100, 300, 512, 100, 300, 512, 100, 300, 512]'
One restriction is that the sync read and write functions can only read/write consecutive control table addresses, as explained in the USB2AX link above, as well as here in the Robotis documentation.
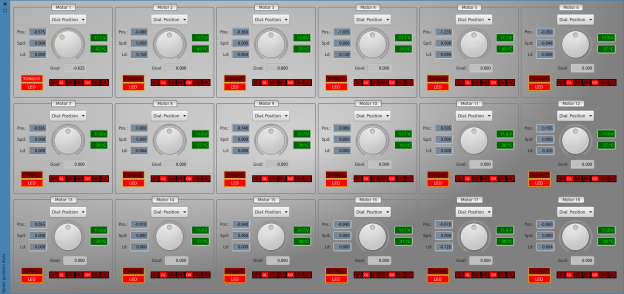
New motor control table value editor
On the GUI side of things, I’ve made a new “motor address editor” as an improvement on the previous “motor value editor”. The new editor allows reading/writing of all control table addresses of the AX-12. You don’t have to worry about writing low/high bytes to the two-byte values, as that is handled by the editor; simply write any valid value to the parameter of interest.
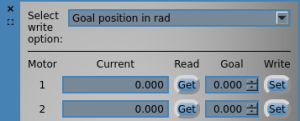
I have kept the old editor as two useful features it has is let me easily write the same value to all motors, as well as send position/speed/torque in “standard” units (rad, rad/s and torque %) instead of raw values.

Old “motor value editor”

New “motor address editor”
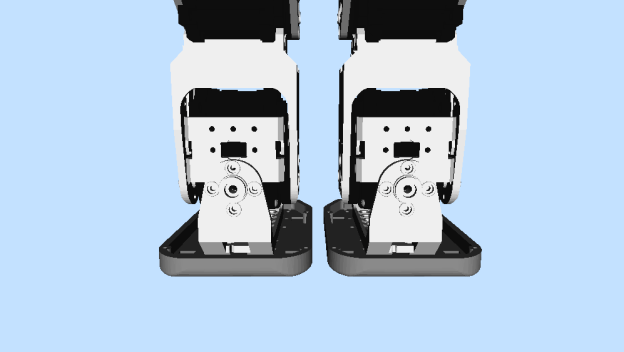
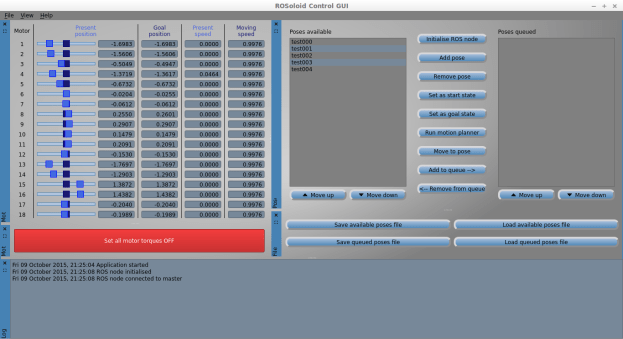
Recording and executing poses
I added a new test function which moves the robot through a sequence of queued poses that are saved in the GUI. The robot pauses between each sequence based on each pose’s specified delay time.
Because the function’s execution has to pause and wait for the specified dwell time time, I added the code into a separate thread. Originally I did this by subclassing QThread, but then updated it and created a “worker object” which is moved to a thread using moveToThread(), as this seems to be the better way in Qt.
Although this is very simplistic motion editor functionality which has been done many times before by other tools, I thought it would be useful to add to my GUI, as it could prove useful in the future as a complement or even a replacement of the MoveIt! ideas if they don’t work out. This GUI is now essentially a one-stop shop for easily testing various ROS functionality and other ideas as I keep on developing along the way!