
The integration of the Bioloid with MoveIt! has reached an important milestone, with the real robot now being able to respond to MoveIt! planned trajectories! There’s still a lot to do to improve performance, but the basic framework is ready. In the next few paragraphs I will try to describe the MoveIt! configuration process up to now.
In a previous post I mentioned how the SRDF file was created as the fist step to configuring the robot to use MoveIt! The joint_state_publisher was already set up to publish the values of the joint states, which it read from my AX-12+ motor controller, so RViz was able to display the current state of the robot’s joints live when connected to the robot. Commands could also be sent to move the robot servo’s (such as those sent by the control GUI), but this was done using my own custom ROS services. The link to closing the loop between MoveIt! and the robot was to make MoveIt! able to command motor movement.
The joint controllers
Some background reading quickly led to the tutorial page on controller configuration. In trying to figure out how to first make my AX-12+motor controller provide the required FollowJointTrajectory action, I first looked at the wiki of the actionlib stack and used a C++ SimpleActionServer. However this would mean having to then implement the trajectory following, something which is already by the ROS joint_trajectory_controller package. So instead I looked into how I could get the robot to use this controller, which to lead to reading about ros_control and a very good tutorial from Gazebo. It took some time to understand how all these packages work together, and finally found that I had to implement the hardware_interface for my AX-12+ motor controller. The biggest challenge was figuring out how to configure the controller YAML files and actually get the controller_manager to spawn the controllers correctly.
I have used various roslaunch files and configuration files that set up and run the joint controllers, which I will upload shortly onto my GitHub page, along with updates to the C++ ROS AX-12+ motor controller.
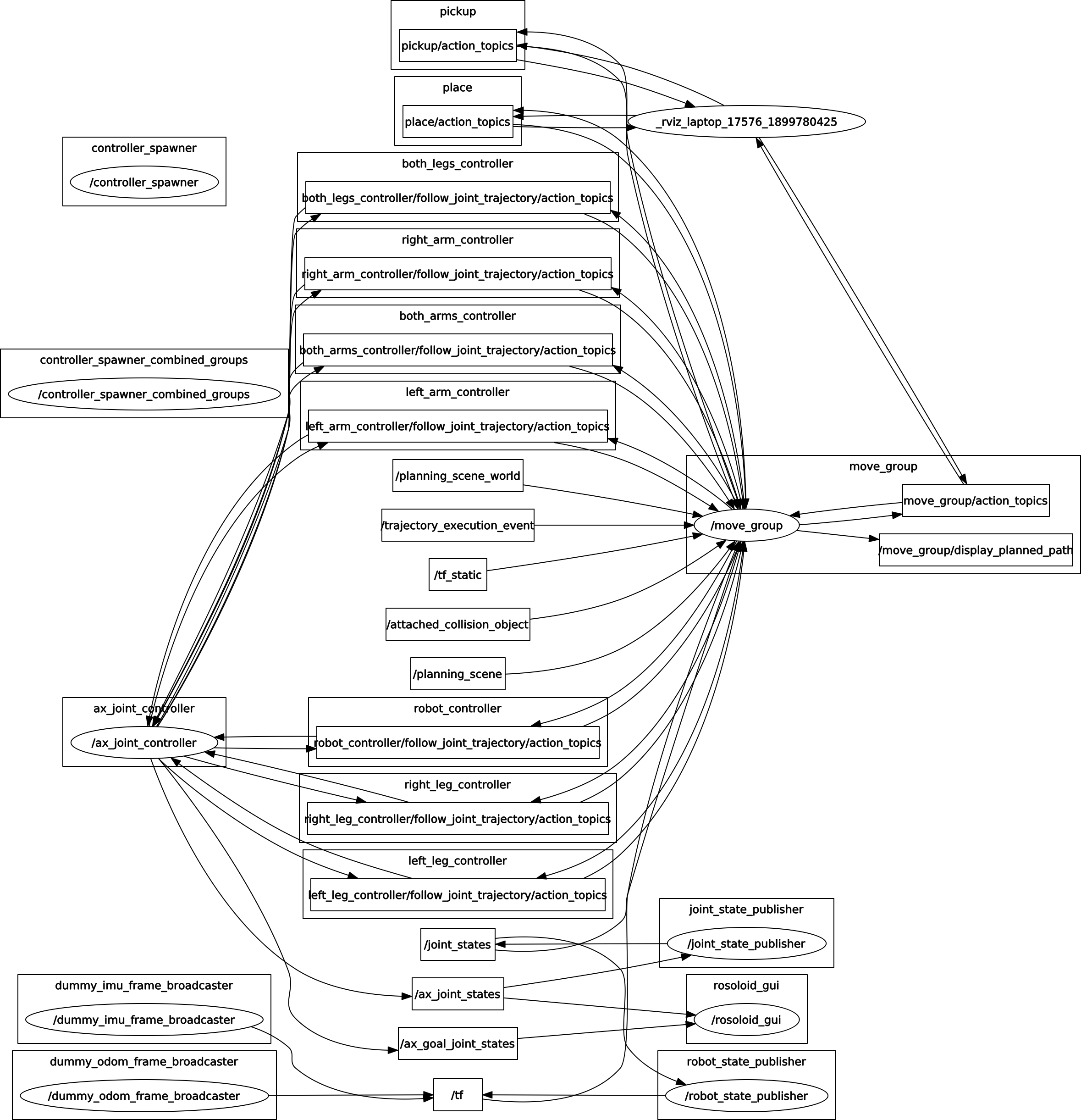
The connections between the various ROS nodes and topics have now grown quite a bit in complexity, compared to the initial ROS interconnections, and now look something like this (captured using rqt_graph):
Useful links
I have put together a list of links, mostly from the ROS answers site, which were very helpful in getting the controllers to finally work:
- ROS control, an overview
- Using Moveit! to actually control a robot
- Gazebo and MoveIt! MoveitSimpleControllerManager and sending joint trajectory messages
- rosrun controller_manager controller_manager list
- Running controller_manager spawner with /mybot/robot_description?
- How to run controller_manager
- implementing realtime controllers with ros_control
- Using Controller Manager and getting it to work.
