The Bioloid story
Many moons ago, I purchased my first humanoid robot, an 18-servo Bioloid Comprehensive Kit. At the time, humanoid robotics for hobbyists was at its early stages, and I chose the Bioloid after much deliberation and comparison with its then main competitors, the Hitec Robonova and Kondo KHR-2HV. I went for the Bioloid mainly because of the generous parts list, which doesn’t limit the design to just a humanoid robot, as well as the powerful AX-12+ Dynamixel servos. These have a number of advantages over the more traditional simple servos, such as multiple feedback options (position, temperature, load voltage, input voltage), powerful torque, upgradeable firmware, internal PID control, continuous rotation option, a comms bus that enables the servos to be daisy-chained … and the list goes on!
After building some of the standard variants trying out the demos, attempting a custom walker, and playing around with Embedded C on its CM-5 controller board, I never got around to actually doing the kit any real justice. I have finally decided to explore the potential of this impressive robot, and make all that money worthwhile!

An old creation

Another view

ASIMO!
This post begins one of hopefully many, in which I will detail my progress with the Bioloid robot.
Initial hardware ideas
The general plan for hardware is to extend the base platform with various components, avoiding the need for custom electronic boards as far as possible, as I want my main focus to be on software.
The Bioloid’s servos are powered and controlled by the CM-5 controller, which has an AVR ATMega128 at its core. I have played around with downloading custom Embedded C to the CM-5, but in terms of what I have in mind, it is much more convenient to be able to control the servos directly from a PC. The standard solution is the USB2Dynamixel, however much of this chunky adaptor is taken up by an unnecessary serial port, so I went for a functionally identical alternative, a USB2AX by a company called Xevelabs. The PC/laptop control will hopefully be replaced by a Raspberry Pi 2 Model B (on back order!) for a more mobile solution. I have not thought about mobile power yet!
Despite the impressive servos, the stock Bioloid offers little in terms of sensors. A provided AX-S1 sensor module has IR sensors/receiver, a microphone and a buzzer, all built in to a single package, which resembles on of the servos, and acts as the Bioloid’s head. Although updated controllers by Robotis have emerged over the years, the original CM-5 had no way of directly integrating sensors to it, and was limited to the AX-S1.
Since a bunch of servos without any real-world feedback does not really make a robot, I am going to add a number of sensors to the base robot. The current plan is to use a MinIMU-9 v3 for tilt/orientation sensing, and a number of Interlink FSR 400 Short force sensing resistors on the feet. Very conveniently, the undersides of the Bioloid’s feet have indents in their four corners which perfectly match the shape of the FSRs! A Pololu A-Star 32U4 Mini SV (essentially an Arduino board) will perform the data collection and pass it over to the PC via serial-to-USB.
That is as far as my current considerations go in terms of hardware. At some point I will look into vision, which may be as simple as a normal webcam. I originally thought that an Xbox Kinect would be ruled out because of size, but apparently it can be done!
Initial software ideas
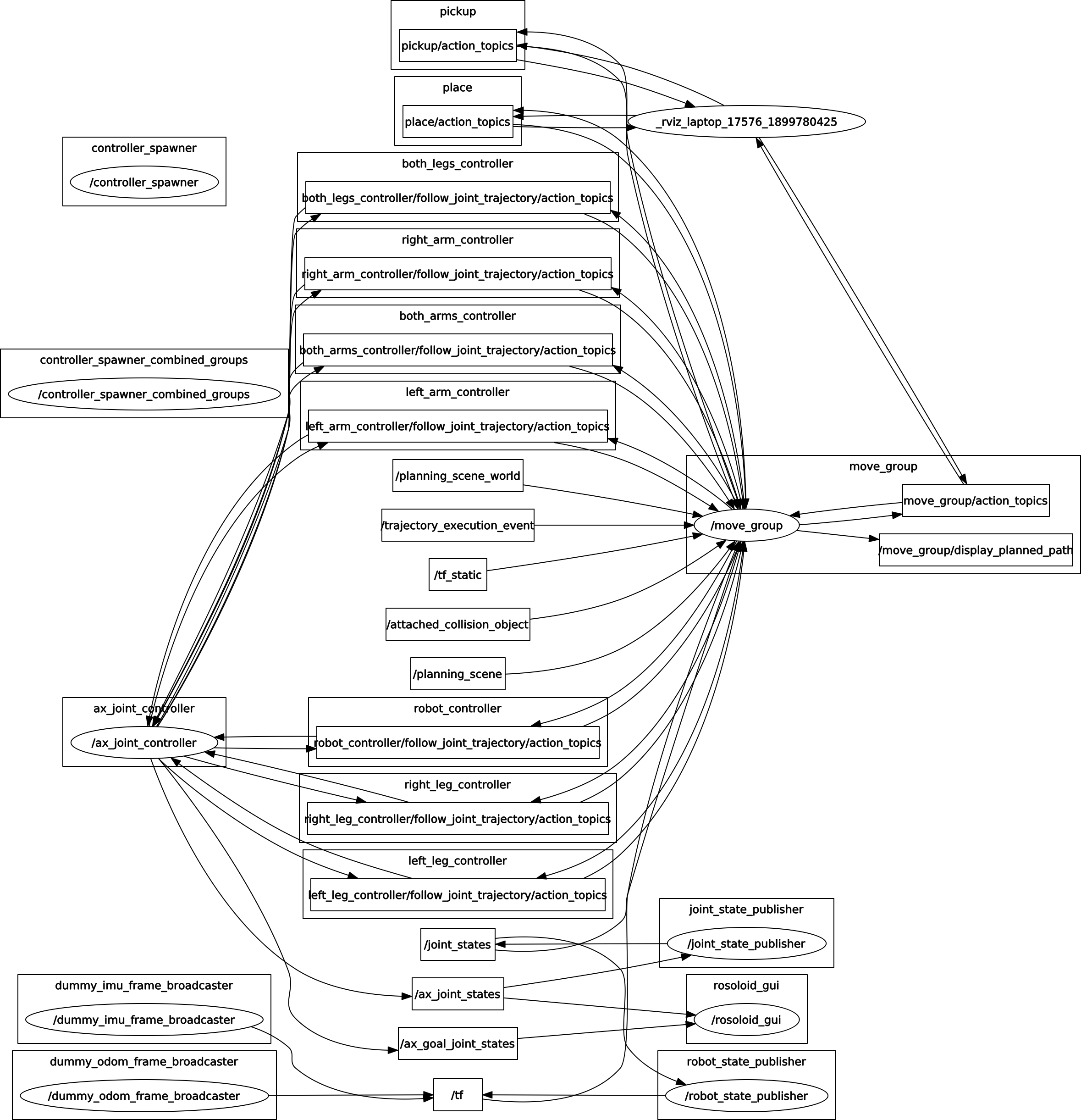
I plan on using ROS (Robot Operating System) as the main development platform, with code in C++. As well as playing around with ROS in the past, its popularity in a large number of robotics projects and large number of libraries makes it a very development platform. Also, I recently discovered the MoveIt! package, which would be great to try out for the Bioloid’s walking gait.
For simplicity, the A-Star will be programmed using the Arduino IDE. I was pleasantly surprised that I wouldn’t have to write any serial comms code to get the sensor data into the ROS environment, as a serial library for the Arduino already exists. ROS is already looking like a good choice!
The A-Star will initially just serve ROS messages to the PC. It may potentially perform other functions if it has the processing power to spare, but for now there is no need. A ROS service running on the PC will be needed to interface with the Dynamixel servos, instructing the servos to move, reading their feedback and publishing the robot’s joint states to various other ROS nodes.
My next post will focus on the new sensor hardware. Until then, please let me know your thoughts and suggestions, all feedback is welcome!