
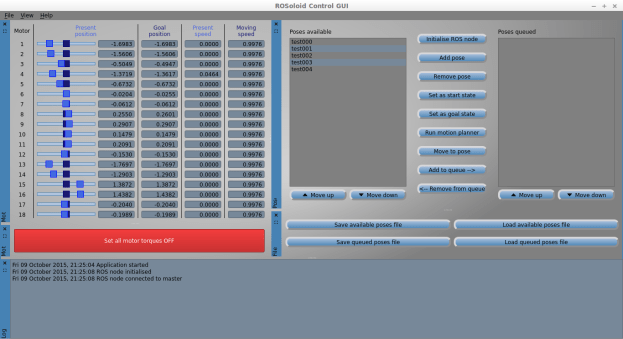
Progress is going well with my Qt control GUI. The main updates are:
- New button to cut torque on all motors.
- New motor value editor, used for writing to the servo control table addresses. The address of choice can be selected, and a value can be set to an individual servo or to all servos at once, using the broadcast ID (254). Also included are three custom functions which write position/speed or torque using more intuitive values: radians, rad/sec or % torque respectively.
- New position dials for directly controlling the position of each motor.
- In order to control and receive feedback from the motors, all these GUI functions interface with the ROS publish/subscribe mechanism or ROS services, which my custom usb2ax_controller ROS package is providing in its own separate ROS node.
- I have been playing around with Qt style sheets to customise the GUI’s main elements such as background, buttons etc.. This was fairly time consuming but overall I think it improves the overall look and feel rather than just having standard grey boxes! I have also used QDockWidget to make various parts of the GUI easy to hide/show, pop out or dock and resize. This seems much more flexible than putting all widgets on one form, or using multiple standard windows or even tabbed windows.

Disconnected

Connected

Motor value editor

Motor position dials
Now the foundations are laid, it’s time to delve deeper into MoveIt!
