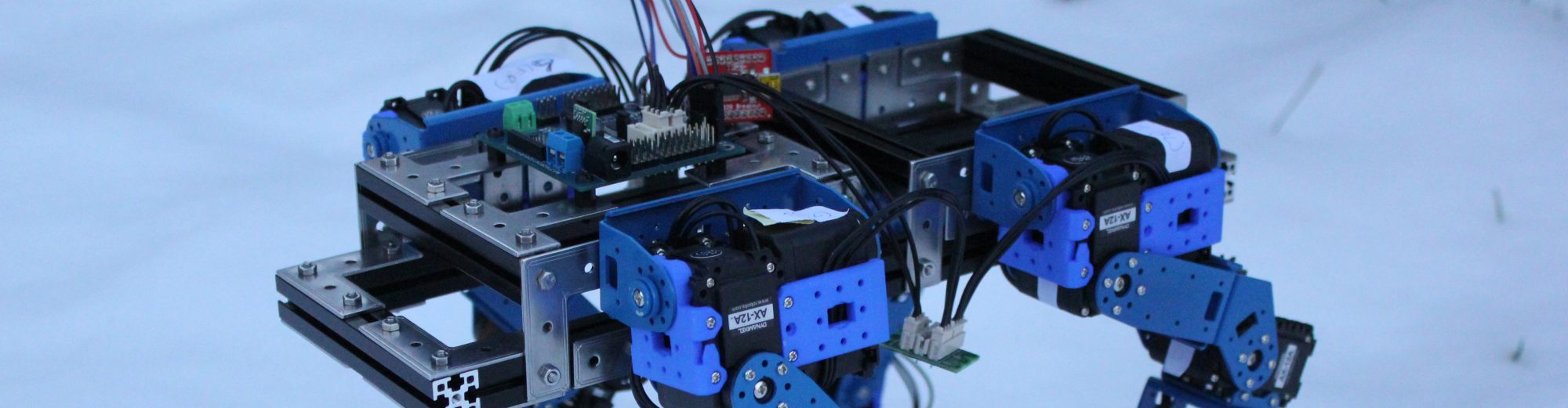
I had briefly tried in the past a simple balancing function using a PID controller, which aims to balance the Bioloid using the ankle motors, by trying to keep the IMU (accelerometer/gyro) vertical. The result was mixed success, but was only an early test. I am considering revisiting this balancing test, but this time using a number of PID controllers to control multiple groups of leg motors(e.g. hips, knees and ankles), while also using the GUI to make testing faster and easier.
On another note, I recently came across the Nengo Neural Simulator, which is a framework for creating neural networks of leaky integrate-and-fire (LIF) neurons for creating complex computational models. It has been used to create Spaun, the world’s largest functional brain model which is able to perform a number of functions such as vision, memory, counting, as well as drawing what is sees by controlling a simple arm.
What stands out is how easy it is to use the Nengo GUI to build neural networks. The interface runs in the browser and visualisations of neuron spiking activity and other metrics are easily shown for each graphical object. There is also support for scripting in Python. Installing it and trying it out for yourself is pretty simple, just follow the Getting Started guide here.

Nengo Interactive Plots.

Obstacle avoidance.
It would be really interesting to see if some form of PID controller could be built using Nengo, and then used to control the Bioloid’s balancing!