Some slow progress lately, but progress nonetheless. First, I have updated the walking gaits with additional target values. Second, I have added a new input mode which allows the predefined walking gaits to be scrolled through via the keyboard or controller inputs. In effect, this means the controller can be used to “remote-control” the walking of the robot! The walking gaits still need a lot of tuning, but the basic function is now implemented.
I have updated the CSV spreadsheet for gait data, so that it now includes the 5 possible degrees-of-freedom of each foot (XYZ and Roll/Pitch), the 6 DoF of the base, and the 2 spine joints.
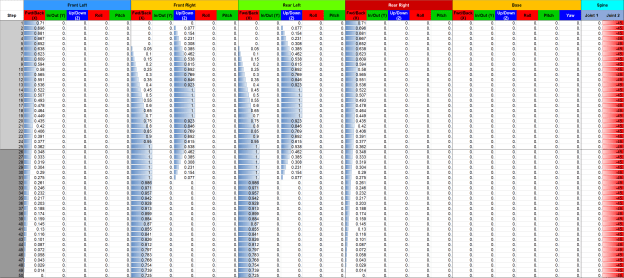
The walking gait’s updated list of foot target values (first 50 out of 100).

The foot target values visualised (base and spine joints not shown).
In Python, all the CSV data is loaded into an array. One of the keyboard/controller inputs can now also be used to update an index, that scrolls forwards/backwards through the array’s rows.
Next, to get the robot to turn, a second input controls a deflection value which adjusts one of the spine joints and the base orientation (as was mentioned in this past post). The deflection slowly decreases back to 0, if the input is also 0.
By doing this, the walking gait can be controlled at will by the two inputs, and hopefully make the robot walk and turn. Next comes the fine-tuning and testing!
All the latest code can be found on the Quadbot17 GitHub project page as usual.