
The Forward Kinematics for the left leg of the Quadbot have been formalised, using modified Denavit-Hartenberg parameters and axes conventions.
I also made a simple Python applet to verify the maths and visualise the leg’s poses. I used Tkinter and three Canvas widgets to show orthogonal views.
The reason I am testing the maths in a quick Python program is that I want to be able to port them easily over to Arduino, as my latest aim is to drop the Raspberry Pi and A-Star 32U4 LV Pi expansion module (shown in some of the latest CAD models) in favour of trying out an ArbotiX controller. A benefit with the latter is that I wouldn’t need a Dynamixel-to-USB converter (e.g. USB2AX) or separate motor power supply.
Next up will be to work out the Inverse Kinematics.
| Link Twist |
Link Length |
Link Offset |
Joint Angle |
|
| j | alpha_i-1 | a_i-1 | d_i | theta_i |
| 1 | 0 | 0 | 0 | th_1 |
| 2 | pi/2 | 29.05 | 0 | th_2 – 34 |
| 3 | 0 | 76.919 | 0 | th_3 + 67.5 |
| 4 | 0 | 72.96 | 0 | th_4 |
| 5 | -pi/2 | 45.032 | 0 | th_5 |
D-H Parameters
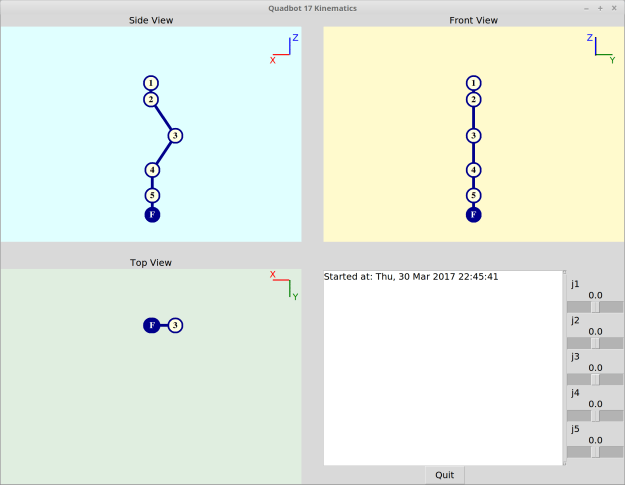
Quadbot kinematics applet, zeroed position

Quadbot kinematics applet, test position using sliders
