
Updates
A few and bits and pieces have been added to the model, along with some updates: Longer lower leg and cover, battery and battery compartment in rear body, main electronics boards, foot base and plate, and two ideas for sensors.
The lower legs were extended as initially the “knee” and “ankle” joints were too close. I think the new arrangement gives the leg better overall proportions.
As the battery pack has significant size and weight, its best to include in the design as early as possible. Originally neglected, I have now added a Turnigy 2200 mAh battery, and updated the rear bumper and bracket to accommodate it. Heat dissipation may be an issue, but I’ll leave it like this for now.
I have also measured the placement of the actuators in order to start thinking about the maths for the kinematics.
Some images of current progress:
-
- Initial short lower legs
-

- Updated longed lower legs and cosmetic covers
-

- Turnigy 2200 mAh 3S Battery
-

- XBOX Kinect v2
-

- Scanse Sweep
-
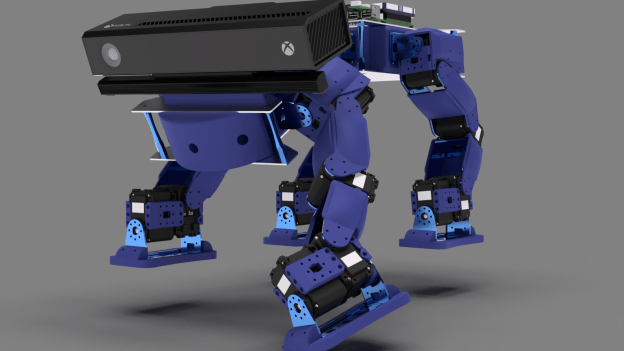
- Quadbot with Kinect (1)
-

- Quadbot with Kinect (2)
-
- Quadbot with Sweep (1)
-

- Quadbot with Sweep (2)
-

- Measurements for the leg kinematics
Sensors
I have tried two ideas for area scanners which could be the main “eyes” of the robot. One is the Kinect v2, and the other a Scanse Sweep.
The main advantages of the Sweep is that it is designed specifically for robotics, with a large range and operation at varying light levels. On its own it only scans in a plane by spinning 360°, however it can be turned into a spherical scanner with little effort. Added bonuses are a spherical scan mounting bracket designed specifically for Dynamixel servos, as well as ROS drivers! It is currently available only on pre-order on SparkFun.
The Kinect has a good resolution and is focused on tracking human subjects, being able to track 6 complete skeletons and 25 joints per person. However it only works optimally indoors and at short ranges directly in front of it. It is however significantly cheaper than the Sweep.
Below is a table comparing the important specs:
|
XBOX Kinect v2 |
Scanse Sweep |
|
|
Technology |
Time-of-Flight |
LiDAR |
|
Dimensions (mm) |
249 x 66 x 67 |
65 x 65 x 52.8 |
|
Weight (kg) |
1.4 |
0.12 |
|
Minimum Range (m) |
0.5 |
~0.1 |
|
Maximum Range (m) |
4.5 |
40 |
|
Sample rate (Hz) |
30 |
1000 |
|
Rotation rate (Hz) |
N/A |
1-10 |
|
FOV (°) |
70 x 60 |
360 (planar) |
|
Resolution |
512 x 424, ~ 7 x 7 pixels per ° |
1 cm |
|
Price (£) |
280 |
80 (32 for adaptor) |
Sources:
- Miscrosoft Kinect hardware
- Scanse Sense user’s manual and technical specifications
- Kinect V1 and Kinect V2 fields of view compared
WordPress tip: One thing I really like about WordPress.com is that there are always ways around doing things that initially only seem possible with WordPress.org. Need to add a table into your post? Use Open Live Writer, make the table then copy-paste the table’s generated HTML source code!
Hardware costs
The current estimated hardware costs are quite high, at around £2100. However about half this budget (£955) is due to the fact that I calculated the costs for the custom 3D printed parts by getting quotes from Shapeways. Getting them printed on a homemade 3D printer would reduce the cost significantly. The other large cost is naturally the 22 AX actuators at £790.
For anyone interested, the preliminary BOM can be downloaded here:
Quadbot 17 BOM – 2017-02-26.xlsx
That’s it for now!
