A better alternative to the RPY approach
After realising in my previous post that solving the gimbal lock problem for the complementary filter requires fiddly and inelegant fixes, I decided to dive into the world of quaternions. Luckily, the theory behind quaternions doesn’t need to be fully understood, in order to use them to represent 3D rotations. Particularly useful are the conversions between quaternion and rotation matrix, and axis-angle representation.
I initially tried to make the Arduino MCU (A-Star) perform the filtering process and pass the IMU frame transform to the PC, however this presented a couple of issues, the first being that there is no standard vector and matrix library in Arduino. Second, although I could write a very simple library for vector cross and dot products etc., the MCU’s 32 KB of flash memory was already almost full with all the rosserial and IMU libraries, leaving little space for anything else.
Hence I opted for letting the MCU simply pass a number of ROS message streams over to the PC, which could then do the required transformations using the ROS tf library. The Arduino code is listed at the end of this post (bioloid_sensors.ino).


The MCU reads the MinIMU-9 v3 IMU data and publishes it as ROS messages on the following topics:
- LSM303 accelerometer x, y, z values (“accel”)
- LSM303 magnetometer x, y, z values (“magnet”)
- L3G gyroscope x, y, z values (“gyro”)
- LSM303 magnetometer heading value (“heading”), derived from the LSM303’s library, as the angular difference in the horizontal plane between the x axis and magnetic North
ROS has a very handy plotting tool for topics, called rqt_plot. Below is an example dump of all the IMU data.

IMU messages plotted in rqt_plot
Quaternion-based filter
Having spent too much time on the RPY approach already, I wanted to find a simple way to achieve a relatively stable orientation from the IMU readings. I ended up implementing the method from this AHRS maths tutorial from the Firetail UAV system. The method is explained very well in that link, so there is no need to go into the details. The only change I have made is in the calculation of the filter coefficient, based on a set time constant as was done previously. My version using a ROS subscriber on the PC side is again listed at the end of this post (imu_tf_broadcaster.cpp and .h files).
Videos
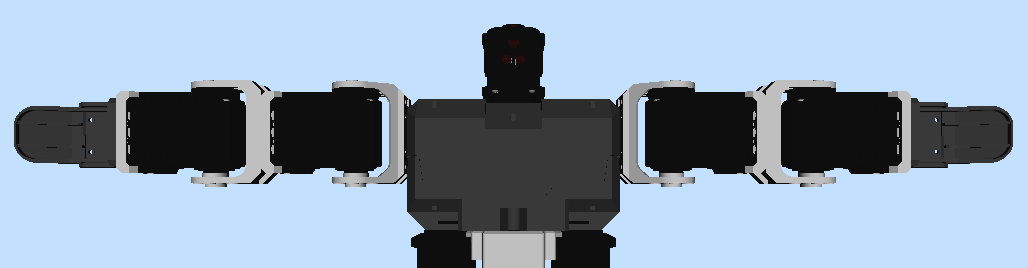
Here are two videos comparing the original RPY approach against the improved quaternion approach. The resulting IMU transform is published by tf, which is used by the robot model you see in RViz, the ROS visualisation tool. The model is generated using a URDF file; I will explain this in detail in a following post.
Although in both cases the rotation is fairly smooth, you can see the problems that the RPY filtering encounters when it nears the gimbal lock position (when the robot lies horizontally). For my purposes of orientating the robot, I think the current quaternion approach is perfectly suited. I doubt I will be needing to play around with Kalman filters and the likes, as I currently don’t need the precision that UAVs etc. may need!
So that’s it for IMUs and orientation for the time being. In my next post I will start detailing the current progress with the virtual bioloid in ROS, which was seen in the above videos.
Code (click to expand):
// Hardware:
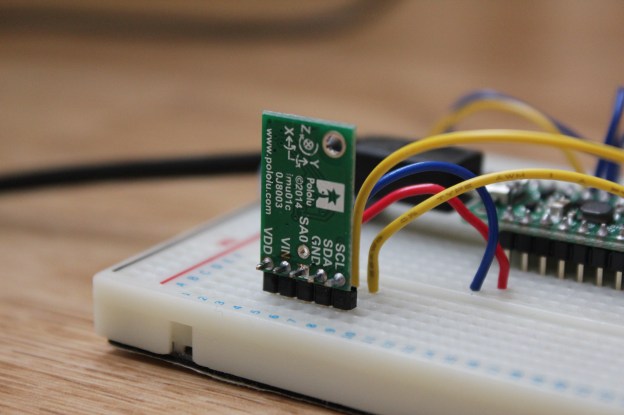
// Pololu A-Star 32U4 Mini SV
// Pololu MinIMU-9 v3 (L3GD20H and LSM303D)
// Interlink FSR 400 Short (x6)
// Important! Define this before #include <ros.h>
#define USE_USBCON
#include <Wire.h>
#include <ros.h>
#include <std_msgs/Int16MultiArray.h>
#include <geometry_msgs/Vector3.h>
#include <std_msgs/Float32.h>
#include <AStar32U4Prime.h>
#include <LSM303.h>
#include <L3G.h>
// Set up the ros node and publishers
ros::NodeHandle nh;
std_msgs::Int16MultiArray msg_fsrs;
std_msgs::MultiArrayDimension fsrsDim;
ros::Publisher pub_fsrs("fsrs", &msg_fsrs);
geometry_msgs::Vector3 msg_accel;
ros::Publisher pub_accel("accel", &msg_accel);
geometry_msgs::Vector3 msg_magnet;
ros::Publisher pub_magnet("magnet", &msg_magnet);
std_msgs::Float32 msg_heading;
ros::Publisher pub_heading("heading", &msg_heading);
geometry_msgs::Vector3 msg_gyro;
ros::Publisher pub_gyro("gyro", &msg_gyro);
unsigned long pubTimer = 0;
const int numOfFSRs = 6;
const int FSRPins[] = {A0, A1, A2, A3, A4, A5};
int FSRValue = 0;
LSM303 compass;
L3G gyro;
const int yellowLEDPin = IO_C7; // 13
int LEDBright = 0;
int LEDDim = 5;
unsigned long LEDTimer = 0;
void setup()
{
// Array for FSRs
msg_fsrs.layout.dim = &fsrsDim;
msg_fsrs.layout.dim[0].label = "fsrs";
msg_fsrs.layout.dim[0].size = numOfFSRs;
msg_fsrs.layout.dim[0].stride = 1*numOfFSRs;
msg_fsrs.layout.dim_length = 1;
msg_fsrs.layout.data_offset = 0;
msg_fsrs.data_length = numOfFSRs;
msg_fsrs.data = (int16_t *)malloc(sizeof(int16_t)*numOfFSRs);
nh.initNode();
nh.advertise(pub_fsrs);
nh.advertise(pub_accel);
nh.advertise(pub_magnet);
nh.advertise(pub_heading);
nh.advertise(pub_gyro);
// Wait until connected
while (!nh.connected())
nh.spinOnce();
nh.loginfo("ROS startup complete");
Wire.begin();
// Enable pullup resistors
for (int i=0; i<numOfFSRs; ++i)
pinMode(FSRPins[i], INPUT_PULLUP);
if (!compass.init())
{
nh.logerror("Failed to autodetect compass type!");
}
compass.enableDefault();
// Compass calibration values
compass.m_min = (LSM303::vector<int16_t>){-3441, -3292, -2594};
compass.m_max = (LSM303::vector<int16_t>){+2371, +2361, +2328};
if (!gyro.init())
{
nh.logerror("Failed to autodetect gyro type!");
}
gyro.enableDefault();
pubTimer = millis();
}
void loop()
{
if (millis() > pubTimer)
{
for (int i=0; i<numOfFSRs; ++i)
{
FSRValue = analogRead(FSRPins[i]);
msg_fsrs.data[i] = FSRValue;
delay(2); // Delay to allow ADC VRef to settle
}
compass.read();
gyro.read();
// Compass - accelerometer:
// 16-bit, default range +-2 g, sensitivity 0.061 mg/digit
// 1 g = 9.80665 m/s/s
// e.g. value for z axis in m/s/s will be: compass.a.z * 0.061 / 1000.0 * 9.80665
// value for z axis in g will be: compass.a.z * 0.061 / 1000.0
// Gravity is measured as an upward acceleration:
// Stationary accel. shows +1 g value on axis facing directly "upwards"
// Convert values to g
msg_accel.x = (float)(compass.a.x)*0.061/1000.0;
msg_accel.y = (float)(compass.a.y)*0.061/1000.0;
msg_accel.z = (float)(compass.a.z)*0.061/1000.0;
// Compass - magnetometer:
// 16-bit, default range +-2 gauss, sensitivity 0.080 mgauss/digit
msg_magnet.x = (float)(compass.m.x);
msg_magnet.y = (float)(compass.m.y);
msg_magnet.z = (float)(compass.m.z);
// Heading from the LSM303D library is the angular difference in
// the horizontal plane between the x axis and North, in degrees.
// Convert value to rads, and change range to +-pi
msg_heading.data = ( (float)(compass.heading())*M_PI/180.0 );
// Gyro:
// 16-bit, default range +-245 dps (deg/sec), sensitivity 8.75 mdps/digit
// Convert values to rads/sec
msg_gyro.x = (float)(gyro.g.x)*0.00875*M_PI/180.0;
msg_gyro.y = (float)(gyro.g.y)*0.00875*M_PI/180.0;
msg_gyro.z = (float)(gyro.g.z)*0.00875*M_PI/180.0;
pub_fsrs.publish(&msg_fsrs);
pub_accel.publish(&msg_accel);
pub_magnet.publish(&msg_magnet);
pub_heading.publish(&msg_heading);
pub_gyro.publish(&msg_gyro);
pubTimer = millis() + 10; // wait at least 10 msecs between publishing
}
// Pulse the LED
if (millis() > LEDTimer)
{
LEDBright += LEDDim;
analogWrite(yellowLEDPin, LEDBright);
if (LEDBright == 0 || LEDBright == 255)
LEDDim = -LEDDim;
// 50 msec increments, 2 sec wait after each full cycle
if (LEDBright != 0)
LEDTimer = millis() + 50;
else
LEDTimer = millis() + 2000;
}
nh.spinOnce();
}
#include "imu_tf_broadcaster.h"
int main(int argc, char **argv)
{
ros::init(argc, argv, "imu_tf_broadcaster");
ros::NodeHandle n;
ros::Rate loop_rate(1000); // Hz
Broadcaster broadcaster;
ros::Subscriber accelSub = n.subscribe("accel", 1000, &Broadcaster::accelCallback, &broadcaster);
ros::Subscriber magnetSub = n.subscribe("magnet", 1000, &Broadcaster::magnetCallback, &broadcaster);
ros::Subscriber headingSub = n.subscribe("heading", 1000, &Broadcaster::headingCallback, &broadcaster);
ros::Subscriber gyroSub = n.subscribe("gyro", 1000, &Broadcaster::gyroCallback, &broadcaster);
while(n.ok())
{
//broadcaster.updateTimers();
//broadcaster.updateRotation();
broadcaster.tfBroadcaster->sendTransform(
tf::StampedTransform(
tf::Transform(broadcaster.getQ(), tf::Vector3(0.0, 0.0, 0.0)),
ros::Time::now(),"odom", "imu_link"));
loop_rate.sleep();
ros::spinOnce();
// std::cout << "dt: " << broadcaster.getDt() << std::endl;
// std::cout << "q.x: " << broadcaster.getQ().x() << std::endl;
// std::cout << "q.y: " << broadcaster.getQ().y() << std::endl;
// std::cout << "q.z: " << broadcaster.getQ().z() << std::endl;
// std::cout << "q.w: " << broadcaster.getQ().w() << std::endl;
// std::cout << "----" << std::endl;
}
return 0;
}
Broadcaster::Broadcaster() :
prevt(ros::Time::now().toSec()),
dt(0.0),
timeConst(1.0),
filterCoeff(0.0)
{
q.setRPY(0.0, 0.0, 0.0);
tfBroadcaster = new tf::TransformBroadcaster();
}
Broadcaster::~Broadcaster()
{
}
void Broadcaster::accelCallback(const geometry_msgs::Vector3::ConstPtr& msg)
{
accel.setX(msg->x);
accel.setY(msg->y);
accel.setZ(msg->z);
}
void Broadcaster::magnetCallback(const geometry_msgs::Vector3::ConstPtr& msg)
{
magnet.setX(msg->x);
magnet.setY(msg->y);
magnet.setZ(msg->z);
}
void Broadcaster::headingCallback(const std_msgs::Float32::ConstPtr& msg)
{
heading = msg->data;
}
void Broadcaster::gyroCallback(const geometry_msgs::Vector3::ConstPtr& msg)
{
dt = ros::Time::now().toSec() - prevt;
gyro.setX(msg->x);
gyro.setY(msg->y);
gyro.setZ(msg->z);
angularVel.setX(gyro.x());
angularVel.setY(gyro.y());
angularVel.setZ(gyro.z());
filterCoeff = timeConst / (timeConst + dt);
// Use accelerometer and magnetometer data to correct gyro drift
correctOrientation();
updateRotation();
prevt = ros::Time::now().toSec();
// std::cout << "angularVel x: " << angularVel.x() << std::endl;
// std::cout << "angularVel y: " << angularVel.y() << std::endl;
// std::cout << "angularVel z: " << angularVel.z() << std::endl;
// std::cout << "----" << std::endl;
}
void Broadcaster::updateRotation()
{
// New quaternion, from axis-angle notation for gyro
tf::Quaternion qNew(angularVel.normalized(), angularVel.length()*dt);
// Update previous value
q *= qNew;
q.normalize();
}
void Broadcaster::correctOrientation()
{
// Use acceleration data only if vector is close to 1 g
if ( fabs(accel.length() - 1) <= 0.1 )
{
// These vectors have to be perpendicular.
// As there is no guarantee that North is perpendicular to Down,
// set North to the cross product of East and Down.
// Gravity is measured as an upward acceleration.
tf::Vector3 Down(accel); // Should be -accel, but not sure why this produces inverted axes!?
tf::Vector3 E = Down.cross(magnet);
tf::Vector3 N = E.cross(Down);
Down.normalize();
E.normalize();
N.normalize();
// The rows of the rotation matrix represent the coordinates in the original
// space of unit vectors along the coordinate axes of the rotated space
tf::Matrix3x3 gyroRotMat = tf::Matrix3x3(q);
// Correction vector
tf::Vector3 cv = ( N.cross(gyroRotMat.getRow(0)) +
E.cross(gyroRotMat.getRow(1)) +
Down.cross(gyroRotMat.getRow(2)) ) * filterCoeff;
angularVel += cv;
}
}
#ifndef IMU_TF_BROADCASTER_H
#define IMU_TF_BROADCASTER_H
#include "ros/ros.h"
#include "geometry_msgs/Vector3.h"
#include "std_msgs/Float32.h"
#include "tf/transform_broadcaster.h"
class Broadcaster
{
public:
Broadcaster();
virtual ~Broadcaster();
void accelCallback(const geometry_msgs::Vector3::ConstPtr& msg);
void magnetCallback(const geometry_msgs::Vector3::ConstPtr& msg);
void headingCallback(const std_msgs::Float32::ConstPtr& msg);
void gyroCallback(const geometry_msgs::Vector3::ConstPtr& msg);
//void updateTimers();
void updateRotation();
void correctOrientation();
tf::TransformBroadcaster* tfBroadcaster;
tf::Quaternion getQ() const {return q;}
double getPrevt() const {return prevt;}
double getDt() const {return dt;}
float getTimeConst() const {return timeConst;}
void setTimeConst(float value) {timeConst = value;}
private:
tf::Vector3 accel;
tf::Vector3 magnet;
float heading;
tf::Vector3 gyro;
tf::Vector3 angularVel;
tf::Quaternion q;
double prevt;
double dt;
float timeConst;
float filterCoeff;
};
#endif // IMU_TF_BROADCASTER_H
